U-Net
논문 링크 : U-Net: Convolutional Networks for Biomedical Image Segmentation
이번 블로그의 내용은 Semantic Segmentation의 가장 기본적으로 많이 쓰이는 모델인 U-Net에 대한 내용입니다.
U-Net의 이름은 그 자체로 모델의 형태가 U자로 되어 있어서 생긴 이름입니다.
이번 블로그의 내용을 보시기 전에 앞전에 있는 Fully Convolution for Semantic Segmentation 과 Learning Deconvolution Network for Semantic Segmentation 을 읽고 보시면 더 도움이 되실 것 같습니다!
Abstract
Abstract에서는 전체적인 U-Net의 핵심 구조, data augmentation, ISBI challenge에서 좋은 성능을 보였다는 이야기를 하고 있었습니다.
Deep Network는 많은 양의 annotated된 학습 샘플을 가지고 성공적인 training을 해왔습니다.
이 논문에서는 data augmentation을 잘 활용하여 annotated sample을 보다 효율적으로 사용하는 training 전략을 보여줍니다.
논문에서 제안하는 아키텍쳐는 contracting path에서는 context를 캡쳐하고, 대칭적인 구조를 이루는 expanding path에서는 정교한 localization을 가능하게 하는 구조입니다.
1. Introduction
논문에서 처음에 소개하는 내용은 지난 2년동안 (U-Net은 2015년 5월에 발표되었습니다.) deep convolution network는 많은 visual recognition 작업에서 매우 좋은 성능을 보였지만, training set의 크기와 고려할 네트워크의 크기 때문에 그 성공은 제한적이었다고 말하고 있습니다.
Convolution네트워크의 일반적인 용도는 이미지에 대한 출력이 단일 클래스 레이블인 분류 작업에 있지만, 많은 시각 작업, 특히 biomedical processing에서 원하는 출력은 localization을 포함해야 하며, 즉 클래스 라벨은 각 pixel에 할당 되어야 한다고 합니다.
U-Net에서 핵심으로 말하고 있는 내용은 세가지로 생각됩니다.
- Convolution Encoder에 해당하는 Contracting Path + Convolution Decoder에 해당하는 Expanding Path의 구조로 구성. (해당 구조는 Fully Convolution + Deconvolution 구조의 조합)
- Expanding Path에서 Upsampling 할 때, 좀 더 정확한 Localization을 하기 위해서 Contracting Path의 Feature를 Copy and Crop하여 Concat 하는 구조.
- Data Augmentation
기존에는(Ciresan et al. [1]) Sliding-window을 하면서 로컬 영역(패치)을 입력으로 제공해서 각 픽셀의 클래스 레이블을 예측했지만, 이 방법은 2가지 단점으로 인해서 Fully Convolution Network구조를 제안하고 있습니다.
두가지 단점은,
- 네트워크가 각 패치에 대해 개별적으로 실행되어야 하고 패치가 겹쳐 중복성이 많기 때문에 상당히 느리다.
- localization과 context사이에는 trade-off가 있는데, 이는 큰 사이즈의 patches는 많은 max-pooling을 해야해서 localization의 정확도가 떨어질 수 있고, 반면 작은 사이즈의 patches는 협소한 context만을 볼 수 있기 때문입니다.
Contracting Path에서 Pooling되기 전의 Feture들은 Upsampling 시에 Layer와 결합되어 고 해상도 output을 만들어 낼 수 있습니다.
하나 더 중요한 점은! 많은 수의 Feature Channels를 사용하는데요. 아래 네트워크 아키텍쳐를 보시면 DownSampling시에는 64 채널 -> 1024채널까지 증가 되고, UpSampling시에는 1024 채널 -> 64채널을 사용하고 있습니다.
네트워크는 fully connected layers를 전혀 사용하지 않고, 각 layer에서 convolution만 사용합니다.
다음으로, U-Net에서는 Segmentation시 overlab-tile 전략을 사용합니다. (그림.2)
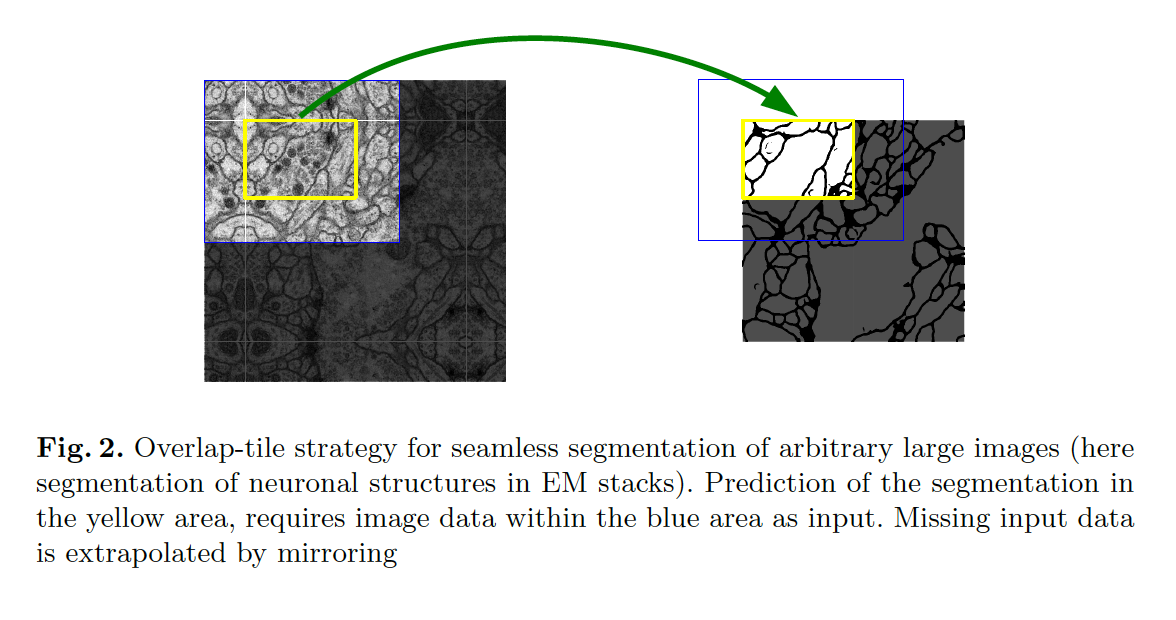
Overlap-tile 전략은, U-Net에서 다루는 전자 현미경 데이터의 특성상 이미지 사이즈의 크기가 상당히 크기 때문에 Patch 단위로 잘라서 Input 으로 넣고 있습니다.
이때
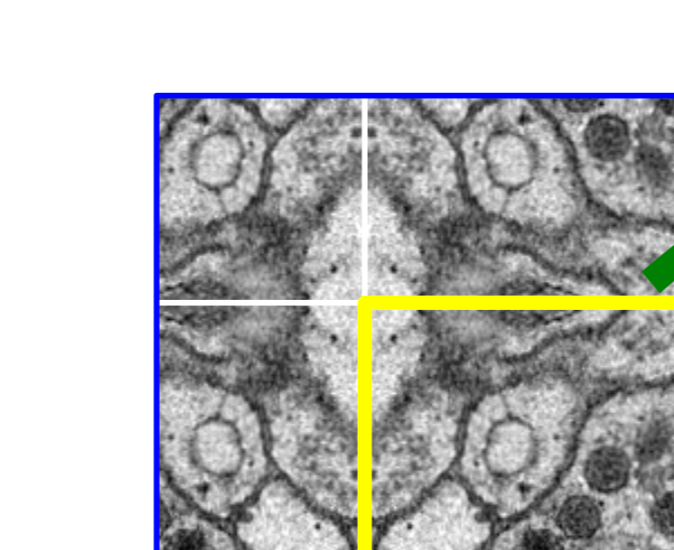
Fig.2에서 보는 것과 같이 Border 부분에 정보가 없는 빈 부분을 0으로 채우거나, 주변의 값들로 채우거나 이런 방법이 아닌 Mirroring 방법으로 pixel의 값을 채워주는 방법 입니다.노랑색 영역이 실제 세그멘테이션 될 영역이고, 파랑색 부분이 Patch 입니다.
그림을 확대해서 자세히 보시면, 거울처럼 반사되어 border부분이 채워진 것을 확인 할 수 있었습니다.
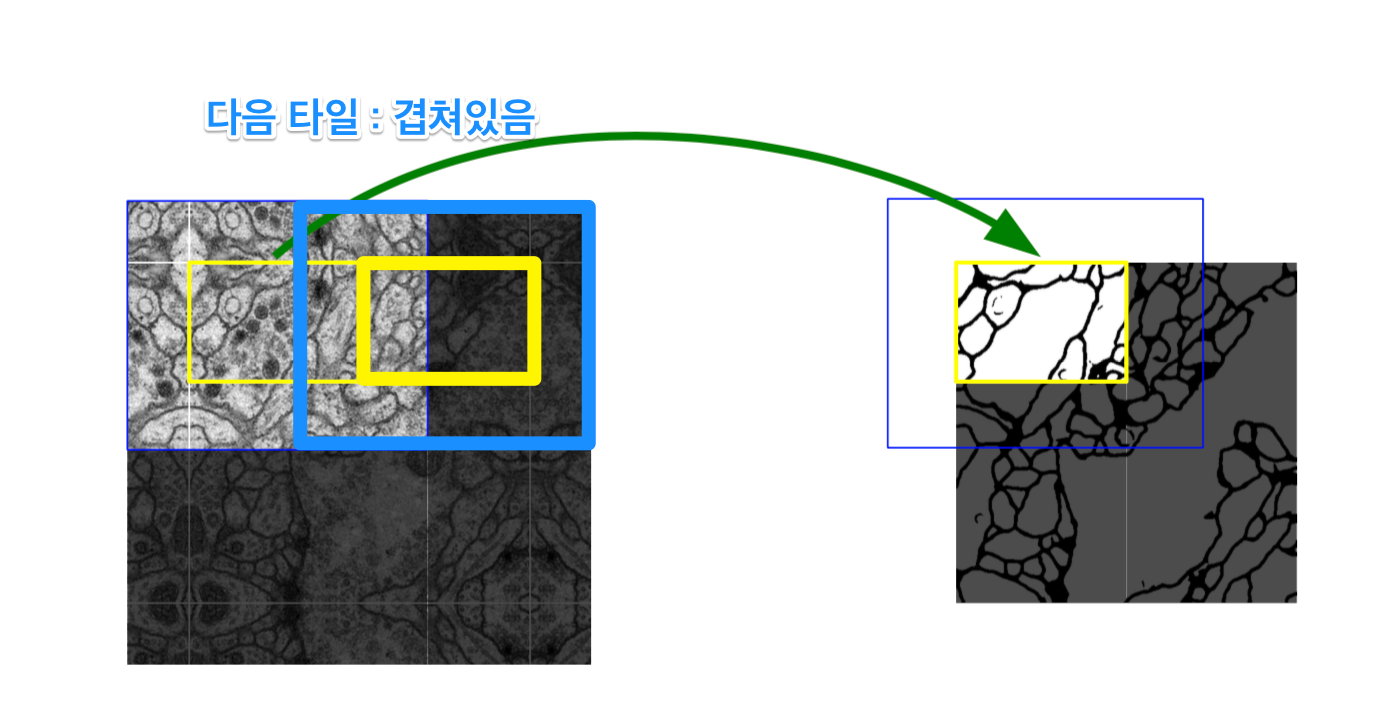
Overlap-tile 이라는 이름은, 파랑색 부분이 Patch단위로 잘라서 세그멘테이션을 하게 되는데 (용어는, Patch == Tile) 이 부분이 아래 그림처럼 겹쳐서 뜯어내서 학습시키기 때문인 것 같습니다.
2. Network Architecture
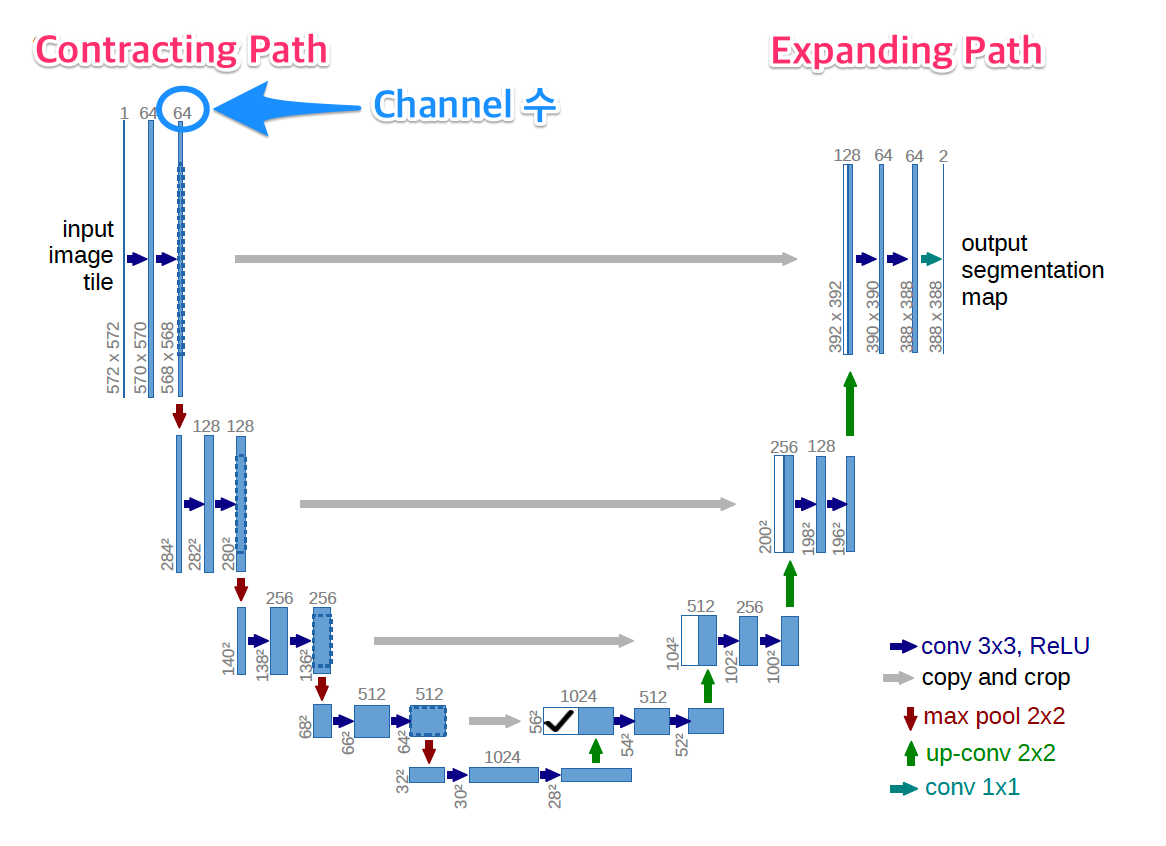
Contracting Path는
- 전형적인 Convolution network 이고,
- 두번의 3X3 convolution을 반복 수행하며 (unpadded convolution를 사용),
- ReLU를 사용합니다
- 2X2 max pooling 과 stride 2를 사용함
- downsampling시에는 2배의 feture channel을 사용하고
Expanding Path는
- 2X2 convolution (up-convolution)을 사용하고,
- feature channel은 반으로 줄여 사용합니다.
- Contracting Path에서 Max-Pooling 되기 전의 feature map을 Crop 하여 Up-Convolution 할 때 concatenation을 합니다.
- 두번의 3X3 convolution 반복하며
- ReLU를 사용합니다
마지막 Final Layer에서는 1X1 convolution을 사용하여 2개의 클래스로 분류합니다.
U-Net은 총 23개의 convolution layer가 사용됐습니다.
3. Training
학습은 Stochastic gradient descent 로 구현되었습니다.
이 논문에서는 학습시에 GPU memory의 사용량을 최대화 시키기 위해서 batch size를 크게해서 학습시키는 것 보다 input tile 의 size를 크게 주는 방법을 사용하는데요, 이 방법으로 Batch Size가 작기 때문에, 이를 보완하고자 momentum의 값을 0.99값을 줘서 과거의 값들을 더 많이 반영하게 하여 학습이 더 잘 되도록 하였습니다.
softmax

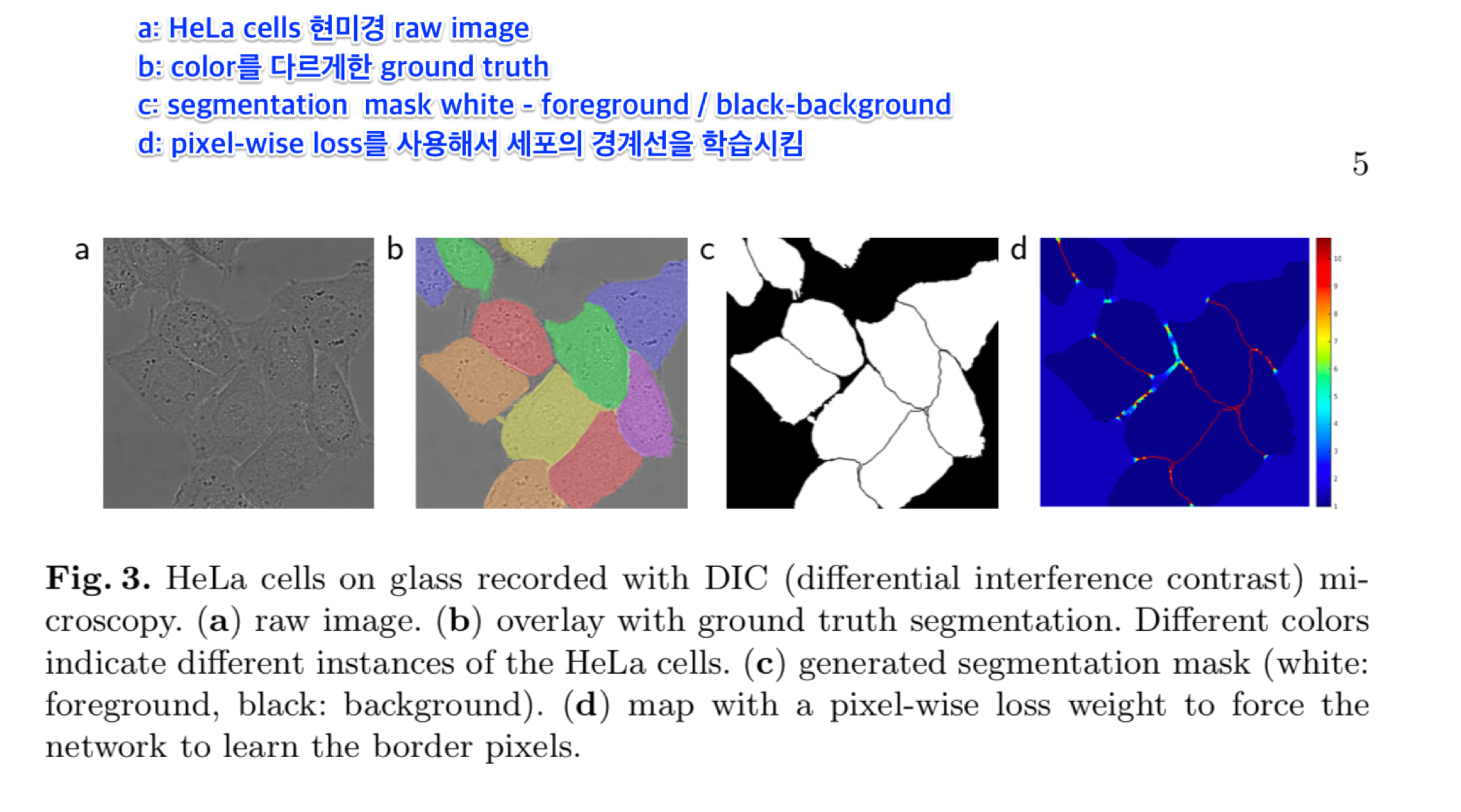
Cross Entropy Loss with w(x)
각각 정답 픽셀에대한 cross entropy loss에는 라는 가중치 값이 추가됩니다. 여기서 의 는 정답 클래스 즉 위 softmax 수식에서 정답의 레이블에 해당하는 값을 반환하는 함수 입니다.
cross entropy 함수는 정답의 추정값을 log에 사용하기 때문에 이에 해당하는 정답의 확률을 가져오는 것이죠. 수식 (1)은 loss 값에 가중치 를 곱한 형태이며 이제 우리가 살펴볼 것은 입니다.

구하는 법 :

는 두개의 텀의 합으로 구성됩니다. 는 위치의 픽셀에 가중치를 부여하는 함수입니다.
는 의 위치에 해당하는 클래스의 빈도수에 따라 값이 결정됩니다.
즉 학습데이터에서 픽셀이 background일 경우가 많은지 foreground일 경우가 많은지의 빈도수에 따라 결정된다고 보시면 됩니다.
그 뒤의 exp 텀은 , 함수를 포함하는데 은 에서 가장 가까운 세포까지의 거리이고 는 두번째로 가까운 세포까지의 거리를 계산하는 함수입니다.
즉 는 세포사이에 존재하는 픽셀이며 두 세포사이의 간격이 좁을 수록 weight를 큰 값으로 두 세포 사이가 넓을 수록 weight를 작은 값으로 갖게 됩니다. 이는 그림 3(d) 를 보시면 명확하게 확인하실 수 있습니다.
네트워크 파라미터의 초기화는 He 초기화 방법을 적용하였습니다.
3.1 Data Augmentation
Data Augmentation은 3 by 3 elastic 변환 행렬을 통해 수행합니다. 영상변환 매트릭스는 클릭하셔서 위키의 내용을 참조하면 자세한 내용을 확인하실 수 있습니다. 세포를 세그멘테이션 하는 것이기 때문에 elastic deformation의 적용이 성능향상에 매우 큰 역할을 했다고 합니다.
4. Experiments
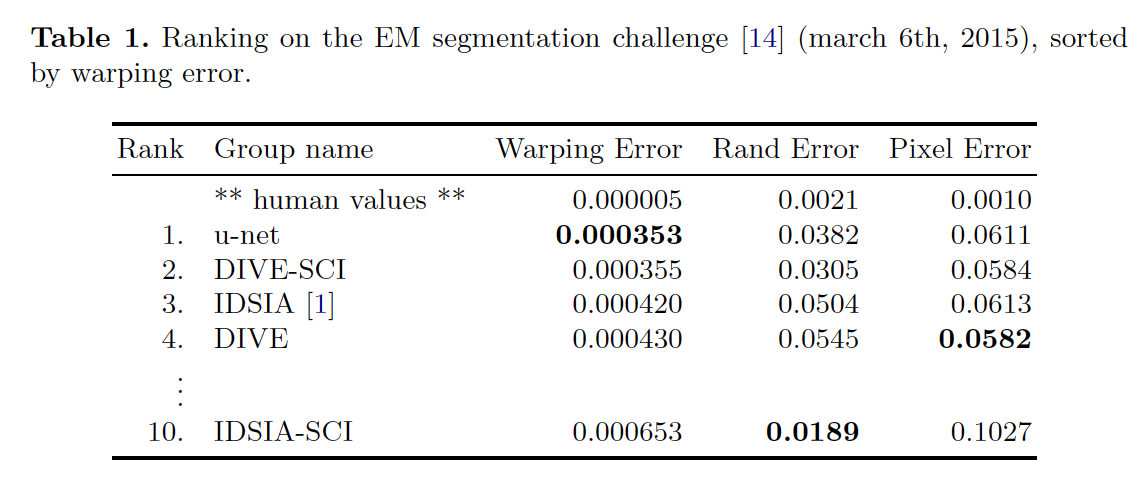
학습한 이후 성능 지표는 EM Segmentation challenge에서 wraping Error / Rand Error / Pixel Error로 1위를 한 지표를 볼 수 있었습니다.
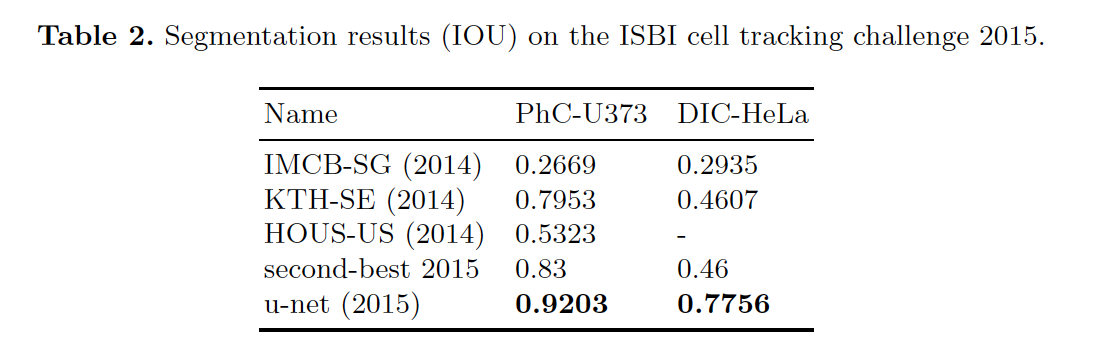
IOU(Intersection over union) 방법으로 측정한 결과로는 아래와 같이 92% / 77.5%로 가장 좋은 성능을 보인것을 확인 할 수 있었습니다.
5. Conclusion
마지막으로 결론입니다.
U-Net 구조는 매우 다른 biomedical segmentation applications에서 좋은 성능을 보였고, 이 성능을 보일 수 있었던 것은 Elastic 변환을 적용한 data augmentation 덕분이고, 이것은 annotated image가 별로 없는 상황에서 매우 합리적이었다고 합니다.
학습하는데 걸렸던 시간은 NVidia Titan GPU(6GB)를 사용했을때, 10시간이었습니다.
이 U-Net 구현은 Caffe 기반으로 제공되고 있으며, U-Net의 아키텍쳐는 다양한 task에서 쉽게 적용되서 사용될 것을 확신한다고 하면서 논문은 마무리 됩니다.
Image Segmentation Task에서 가장 많이 쓰이는 U-Net은 U자형 아케텍쳐와 Fully Convolution & Deconvolution 구조를 가지고 있는 것으로 좀 더 정확한 Localization을 위해서 Contracting Path의 Feature를 Copy and Crop해서 Expanding Path와 Concat하여 Upsampling을 한다는 것을 확실하게 알아두면 좋을 것 같습니다.
이상 부족하지만, U-Net 논문에 대한 포스팅을 마치겠습니다. 틀린 부분이 있거나 보충 내용이 있으시면 언제든지 말씀해 주시면 수정하도록 하겠습니다!
감사합니다.
